Modeling frictional non-planar contacts for compliant gripper jaws
When an object is grasped with compliant gripper jaws, the contact area might be non-planar. This work presents a friction model for such non-planar area contacts by using a limit surface. [Paper (ICRA 2017)] [Spotlight Talk] [Poster]
 |
 |
|---|---|
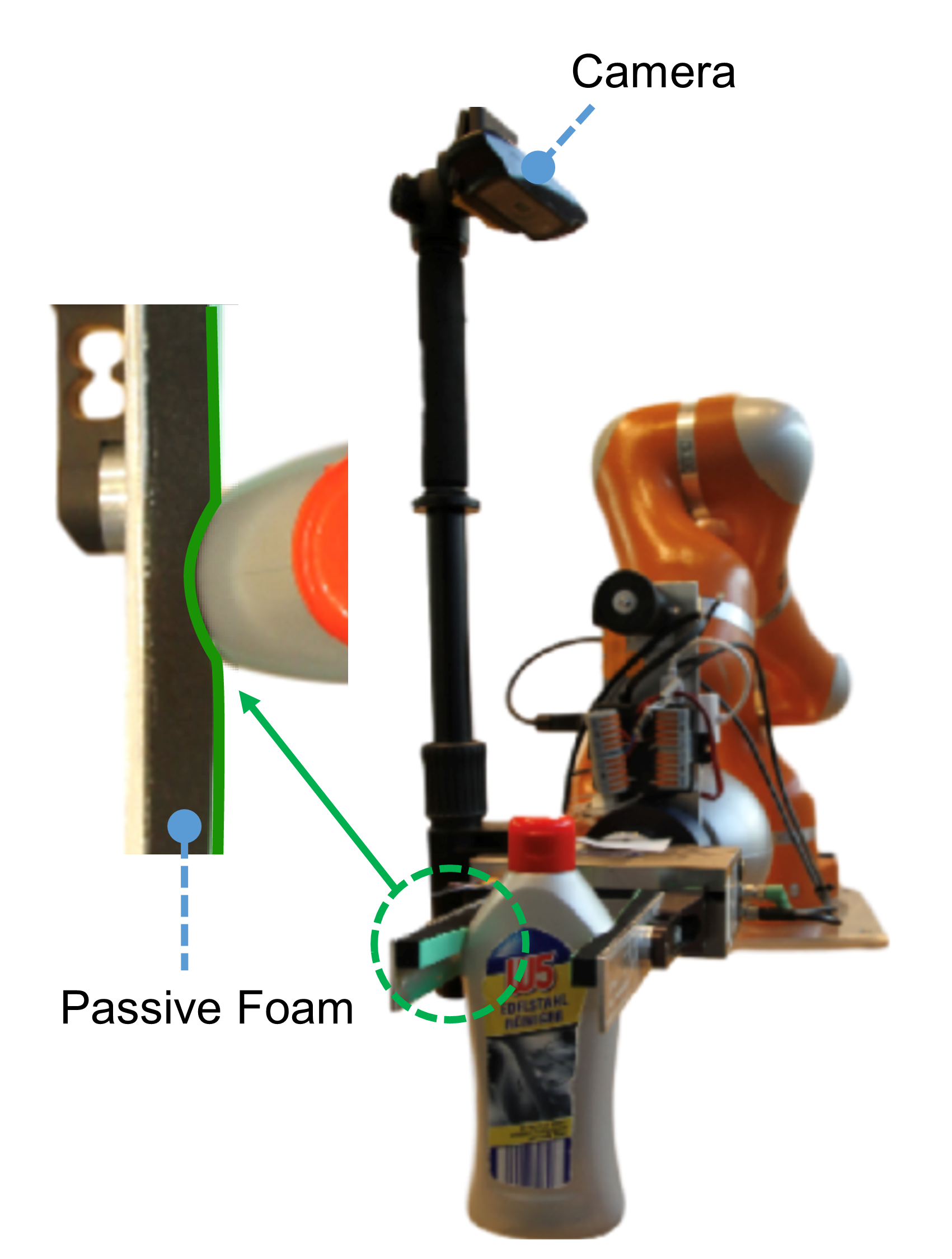
| System Setup Tactile Sensors by Visevi Robotics |
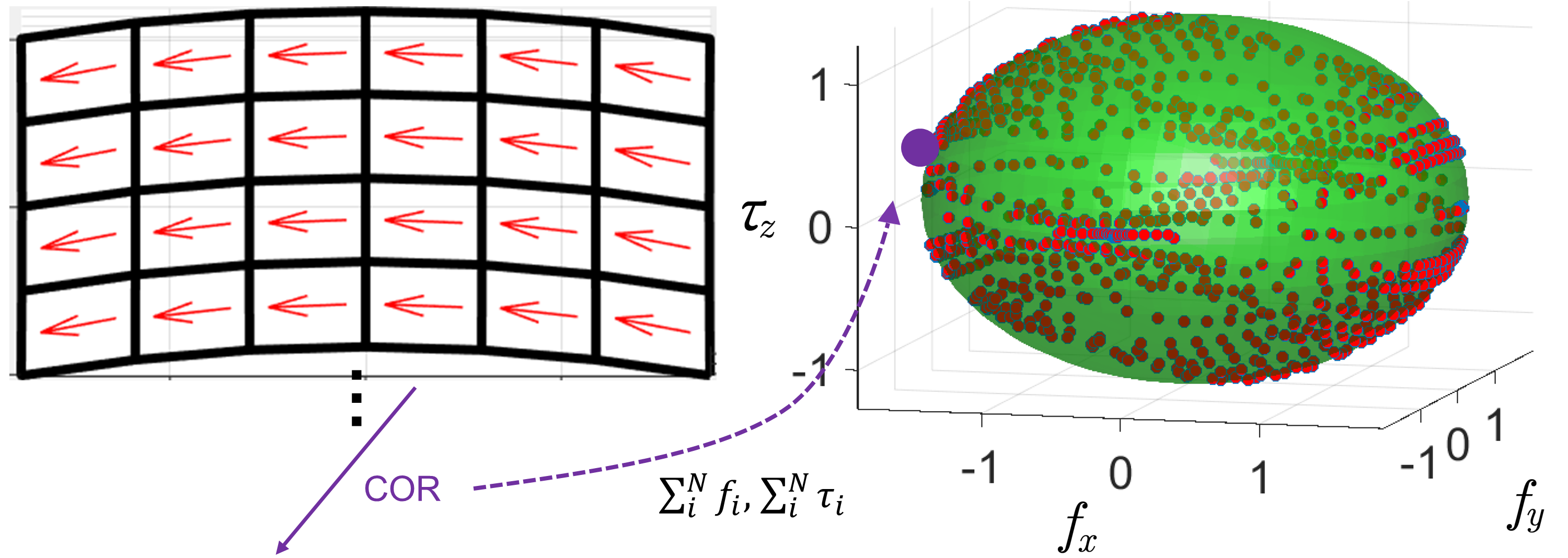
Friction analysis of an example location of the center of rotation (COR) axis and the limit surface of this contact. |
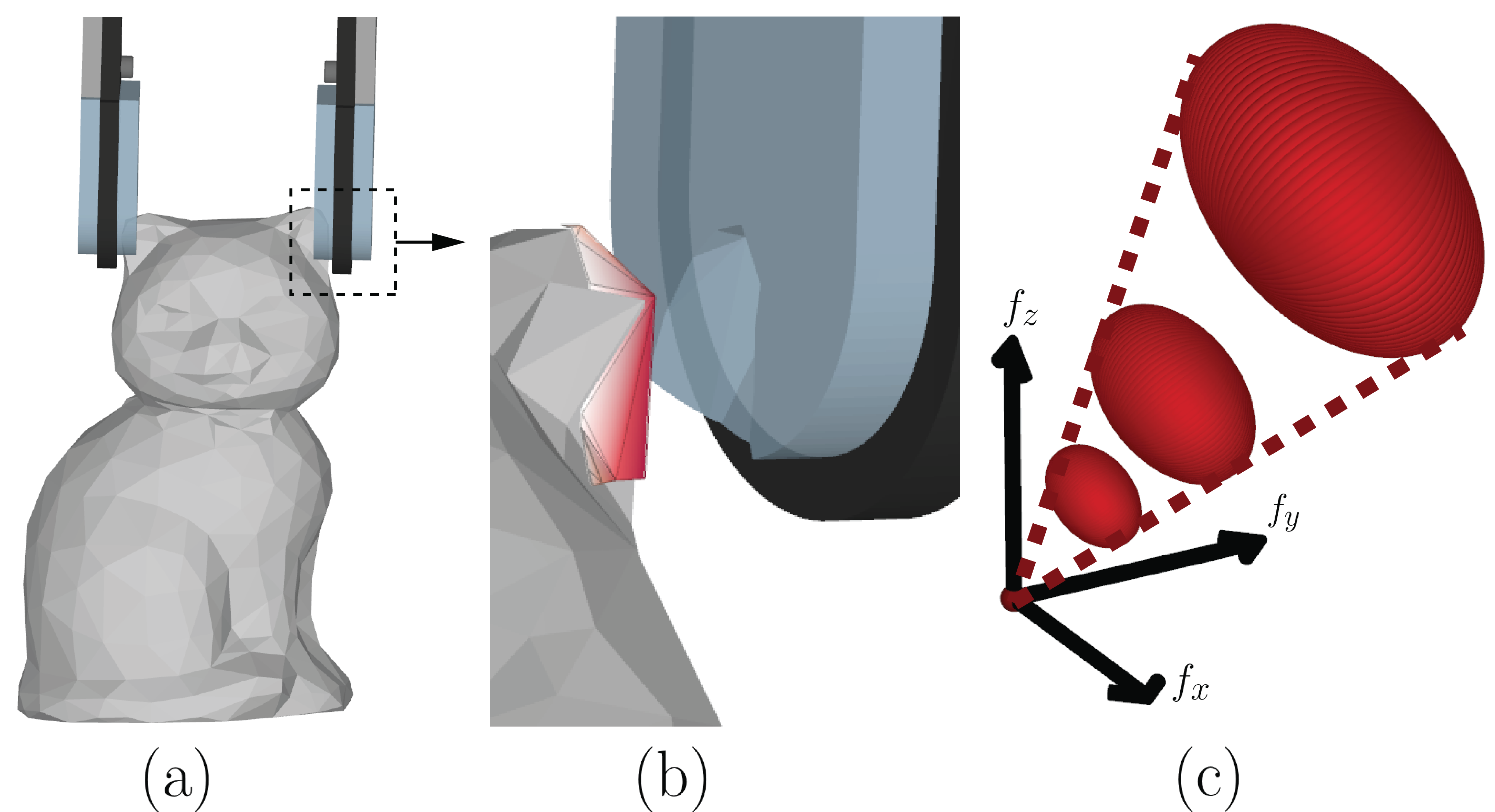
Building on this work and the traditional 3D friction cone for point contacts, we present the 6D friction cone (6DFC) to efficiently plan soft non-planar area contact grasps. [Paper (ICRA 2020)] [Video (3 min)] [Presentation (10 min)] [Website]
Minimal work grasps for 3D deformable hollow objects
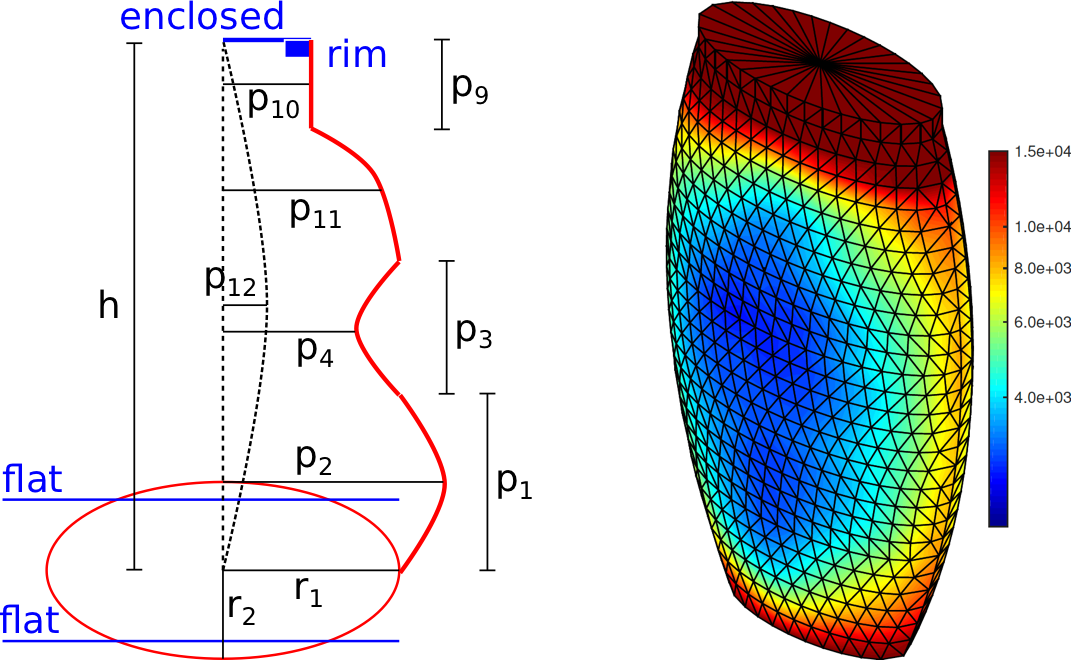
Robot grasping of deformable hollow objects such as plastic bottles and cups is challenging as the grasp should resist disturbances while minimally deforming the object so as not to damage it or dislodge liquids. We propose minimal work as a novel grasp quality metric that combines wrench resistance and the object deformation. [Paper (ICRA 2020)] [Video (3 min)] [Presentation (10 min)] [Website] [Code and Dataset]

Learning-based modular task-oriented grasp stability assessment
A learning-based approach for grasp stability assessment is usually trained for a specific task, such as lifting, hand-over, or pouring. Directly applying the same model to a new task might cause unnecessary grasp adaptations or a failure of the action.
To address this issue, we divide a manipulation task into several sub-tasks, defined as modular tasks. We train the models to estimate the grasp stability of modular tasks, such that they can be flexibly combined and adapted to new manipulation actions.
[Paper (IROS 2018)]
[Video]

A dataset of thin-walled deformable objects
We present a dataset of synthetic thin-walled object models with volumetric representations, which is generated based on 13 physical objects. [Paper] [Dataset]